February 17, 2015
这是我在知乎的一个回答,竟然还上了知乎日报~
问题:
双眼可以测距和建立立体环境,双摄像头可以吗?
回答:
本人研究生阶段主要做三维重建,简单写一些自己所了解的。
首先三维和二维的区别,这个大家都容易理解,二维只有x、y两个轴,比如一张素描画,我们整体的感觉是“平”的,而三维则是多了一个z轴的维度,这个z轴的直观理解就是点离我们的距离,也即 “depth(深度)”。
再来看看我们人眼,人眼是一个典型的双目系统,大家可以做个小实验:闭上一只眼睛,然后左右手分别拿着一只笔,试着让笔尖相碰,哈哈,是不是有怀疑人生的感觉? 我们分别用左右眼看同一个物体,可以清楚地感觉到图像的差异,这个差异就是我们形成三维视觉的基础,有了这左右眼图像的差异,配合大脑强大的识别匹配能力,我们就能基本确定物体离我们的距离,也即之前说的”深度”,上个实验中我们只睁开一只眼睛,虽然能清楚的看到左右手中的笔,但是大脑没法得出深度信息,所以你在“上下左右”方向上能准确定位,但是“前后”方向上却无能为力。
现在来说说左右图像的“差异”到“深度”的转换,这里可能需要一点点空间几何知识,其实也很简单,上图
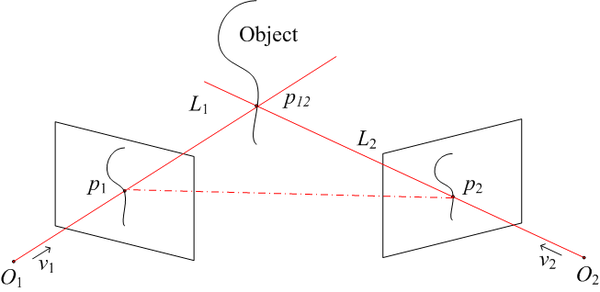
物体上的点p12分别对应左右图像上点p1和p2,求解p1、p2、p12构成的三角形,我们就能得到点p12的坐标,也就能得到p12的深度。这个计算对于人脑来说是小case,或者说可能不需要计算,我们更多地依赖经验和强大的脑补能力,虽然我们不能计算出某个物体离我们的精确距离,我们却能非常准确地建立物体距离的相对关系,即哪个物体在前,哪个在后,这对日常生活已经足够了。
而我们做工程上的双目视觉三维重建,核心目标就是解上图所示的三角形,相机可以抽象成一个简单的透视系统:
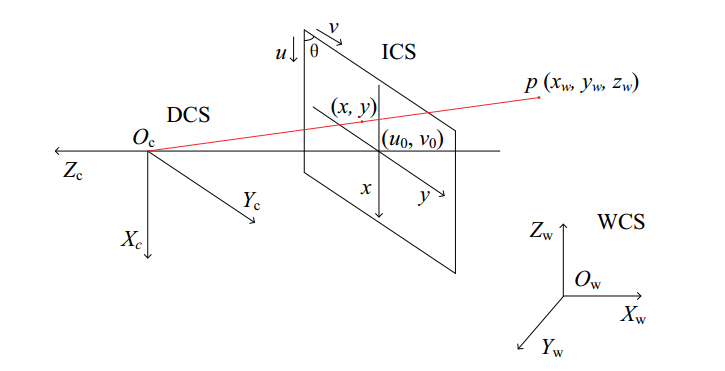
空间点p经过相机成像,映射到图像上点(x,y),其中Oc是相机光心,WCS、DCS、ICS分别是世界坐标系、设备(相机)坐标系、图像坐标系。空间点p到相机图像上点的几何变换可以用相机内参来描述,具体公式就不说了,可以简单地理解为相机拍照是对点的几何坐标变换,而相机内参就是决定这个变换的一些参数。
继续看之前的光学三角关系图,O1、O2分别是左右相机的光心,现在我们要做的就是确定这两个相机的相对位置关系:可以用旋转矩阵R和平移向量T来描述,确定了R和T,两个相机的位置关系就确定了,这个步骤叫做相机的外参标定。一般的做法是用三维重建的逆过程来做,即由一系列已知的p1、p2和p12来求解光学三角形,估计出最优的R、T。简而言之,外参标定确定相机之间的相对位置关系。
好了,现在我们只需要知道p1、p2的坐标,我们就能轻松算出p12的坐标,完成三维重建。我们把p1、p2称为一个点对(pair),他们是同一个空间点在不同相机中的成像点。寻找这样的点对的过程称为立体匹配,它是三维重建最关键,也可以说是最难的一步。我们都玩过“大家来找茬”,找的是两幅图的不同点,而立体匹配则是找“相同点”。对人脑来说,这个问题太easy了,给你同一个物体的两幅图,你能轻松找出一副图像上的点在另一幅图像中的对应点,因为我们人脑的物体识别、分割、特征提取等等能力实在太强了,而且性能特别高,估计几岁的小孩就能秒杀现有的最好的算法。
常规的匹配算法一般通过特征点来做,即分别提取左右图像的特征点(常用sift算法),然后基于特征点配合对极几何等约束条件进行匹配。不过这类匹配算法精度都不是太高,所以人们又想了其它一些方法来辅助匹配,结构光方法是目前用的比较多的,原理不难理解,就是向目标物体投射编码的光,然后对相机图像进行解码,从而得到点对,举个简单的例子,我们把一个小方块的图案用投影仪投到物体表面,然后识别左右相机图像中的小方块,如果这个小方块很小,看作一个点,那么我们就得到了一个点对。
贴个线结构光的示意图:
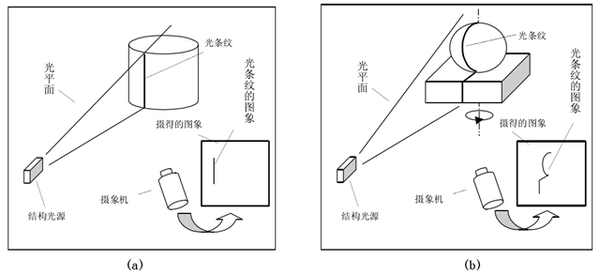
这个示意图里面只有一个相机,其实投影仪是可以看作相机的:投出的光图案照射在物体表面相当于被拍照的物体,而投影仪的输入图像则相当于相机拍出来的照片,所以投影仪也是当作相机并用同样的方法来标定内外参,即上图本质上也是双目视觉系统。
总结一下,双目视觉三维重建的基本过程:相机内参、外参标定 -> 立体匹配 -> 光学三角形求解,这里面最核心、也最影响重建效果的就是立体匹配。
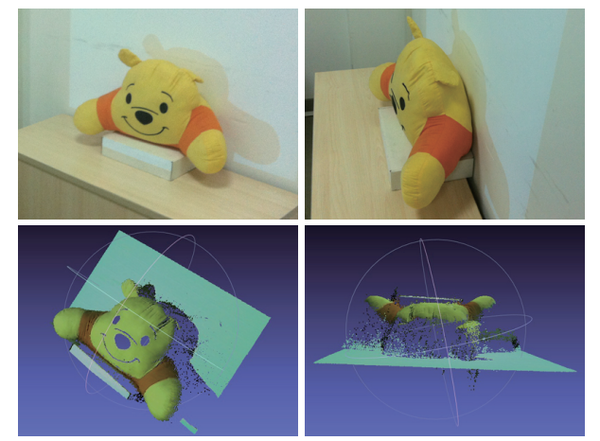
贴几张本人实验的图(用的最基本的格雷码结构光):
以上说的都是双目视觉三维重建,实际上还有其它一些重建方法,如早期的探针法,简单粗暴,直接拿探针在物体表面移动,一个点一个点测坐标;还有一类通过直接测距来进行三维重建,如超声波、TOF,即对物体表面逐点用声、光程差来测距,从而得到三维点云;光学方法分为主动和被动两大类,主动和被动指的是是否向物体表面投光,主动方法有激光扫描、相位测量以及我毕设的研究课题结构光方法等,被动方法有单目视觉(如阴影法)和上文所述的立体视差方法等等。
目前还有一类三维重建方法非常火:SFM(Structure from Motion),这类方法的特点是不需要相机参数,仅仅根据一系列图像就能进行三维重建,也就是说,你随便拿个手机对着物体拍一些图片就能重建这个物体的三维模型,大家可以去体验下AutoDesk公司的Autodesk 123D Catch,除了近距离物体的三维重建,SFM还有更激动人心的应用:大型场景三维重建,感兴趣的可以看看这个Building Rome in a Day,他们在flickr上搜索两百万张罗马的照片,通过亚马逊提供的计算服务,最终得出整个城市的三维模型,是不是又有云计算、大数据的感觉。。。这波人貌似有几个是Google Earth团队的。优酷上有个很短的视频,原理上其实也不难理解:从特征点对入手,反向求解出相机的内外参(选定一个相机作为世界坐标系),然后重建更多的点。
大家应该对电影《普罗米修斯》里面的用于洞穴建模的飞行器印象深刻:

再看看目前发展迅速的无人机,这方面确实有很多东西值得尝试。
最后从产品上来说,现在的三维扫描仪已经很多了,不过国内自主技术的不多(很多都是做国外产品的代理),本人之前整理了一个文档:三维扫描产品,有兴趣的可以看看。
后记
写这个回答最深的感触就是,把一个东西说清楚真不是件容易的事,特别是当这个东西有一定的专业性,而表达的目标对象又是普通大众的时候。这里讲究的是换位思考,把自己当做对这个东西一无所知的小白,站在读者的角度来写,其实和产品经理有点类似,从用户的角度来设计产品,而不是想当然地任凭自己的喜好。个人比较讨厌一些专业教材和论文的写法,语句死板,把简单的东西往复杂里说,读起来没有丝毫趣味,完全感觉不到作者的存在。